Survey Instruments
The Origin of the Survey Meter
Paul Frame, Oak Ridge Associated Universities
A Very Early, if Not the First, Radiation Survey Meter
It was during 1928, his first year at the NBS, that Lauriston Taylor probably received the bulk of his lifetime dose from radiation. It happened while he was calibrating clinical radiation meters in an X-ray beam. After one instrument change-out, he forgot to replace a two foot by two foot lead panel that was in his direct line of sight of the 200 kV water-cooled tube. Unfortunately he didn’t notice that the panel was missing until he had completed several minutes of high intensity measurements.
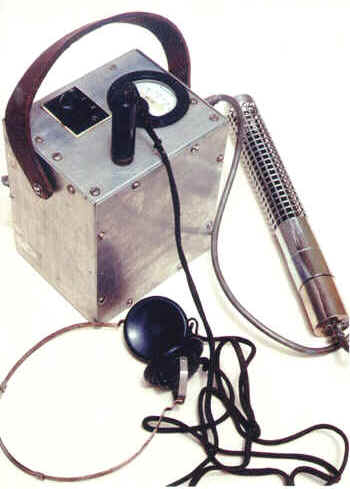
Reconstructing the exposure, and performing measurements with film and a Fricke-Glasser dosimeter, he estimated that he had received an exposure of 200 R. At the time, he was somewhat relieved because this was substantially lower than what was being used in radiotherapy. Nevertheless, he felt that it was probably best to prevent the recurrence of such an event. His solution was to construct a battery operated instrument which he could carry with him to measure exposure rates. The device employed a string electrometer that was coupled to one of three interchangeable thin-walled aluminum chambers. If not the first, it was certainly a very early portable survey instrument.
Robley Evans Invents the Count Rate Meter
Robley Evans is generally credited with developing the first whole body counter, the purpose of which was to measure the radium burden in the bodies of radium workers. This device employed a Geiger-mueller (GM) tube and Evans wanted to improve its sensitivity. To this end, he undertook a series of exhaustive investigations into the role of fill gas pressure and cathode construction (Evans and Mugele 1936). The result was a GM tube that used a copper screen as its cathode. The increase in the cathode surface area gave the detector double the gamma sensitivity of the traditional tube—something sufficiently marvelous that Lauriston Taylor (Taylor and Sauer 1984) remarked it was "so nice, it’s almost cheating."
Still, the achieved sensitivity presented a problem: the mechanical registers that were used to count the pulses had a long resolving time (ca. 0.1 second) and couldn’t handle the higher count rates. What to do? The solution came to Evans during a particularly good rally with co-worker Newell Gingrich in a ping pong game in Evans’ basement (Kathren and Ziemer 1980). Evans shouted, "I’ve got it!," stopped the game and explained the concept to a skeptical Gingrich who didn’t think it would work. Perhaps, Gingrich was in a contrary mood because of the interruption to a game he thought he was about to win. In any event, the next morning Evans and Gingrich built a prototype. Lo and behold, it worked: the first direct reading count-rate meter (Gingrich et al 1936). They referred to it as a "speedometer."
Robley Evans and the First Radiation Survey with a Count Rate Meter
However, to my knowledge, the next story has never been written down. It was told to me by Dr. Evans in the summer of 1995. Since then, Bob Gallaghar has added a couple of details. It is the story of the very first radiation survey using a count-rate meter:
The year was 1936, or thereabouts. A radium-containing industrial radiography source had disappeared at a General Electric (GE) facility in Lynn Massachusetts and GE’s insurance company, Liberty Mutual, was immediately notified. To head off liability claims, Liberty Mutual contacted Evans at MIT and asked him to help locate the missing source. Evans packed up his count-rate meter, a long extension cord, and a GM detector, and off he went. Surveying the plant with his bulky equipment connected to long cables and running off AC current was a cumbersome process, but eventually Evans located a strong source of radiation coming from an unexpected location: a worker’s locker. When the locker was opened, the man’s clothes were inside and the radium source was in the pocket of a shirt. The worker was immediately tracked down and found to have a severe skin burn on his chest. And on his back, opposite the burn on the front of his body, was a patch of erythema. As Evans recounted the incident, "It got him right through the heart... those were the days of the wild west."
References
- Evans, R.D.; Mugele, R.A. Increased gamma-ray sensitivity of tube counters and the measurement of the thorium content of ordinary materials. Rev. Sci. Instr. 7:441-449; 1936.
- Gingrich, N. S.; Evans, R.D.; Edgerton, H.E. A direct-reading counting rate meter for random pulses. Rev. Sci. Instr. 7:450-456; 1936.
- Kathren, R.L. and Ziemer, P.L. ed., “Health Physics: A Backward Glance” Pergamon Press , New York , 1980;
- Taylor, L. S.; Sauer, K.G. Vignettes of early radiation workers (Transcripts of the videotape series): Robley D. Evans. U.S. Dept. Of Health and Human Services; Rockville; 1984.
General Information About the Development of Survey Meters
The Birth of the Instrumentation Companies
Prior to WW II, only a handful of companies produced any type of nuclear instrumentation, e.g., the Victoreen Instrument Company, Technical Associates, Cyclotron Specialties, and Eck & Krebs (which manufactured glass walled GM tubes). Overall, there was relatively little demand for their products. At the time, the only commercially available survey instrument seems to have been an ion chamber manufactured by Victoreen.
During the war three “instrument crises” arose that stimulated the development and production of survey meters (Ralph Lapp). The first was Operation Peppermint which was devoted to countering the potential use of radioactive materials against Allied forces during the invasion of Europe. The Victoreen Model 247 was developed as part of this effort. The second crisis involved producing the instrumentation required for the Hanford Engineer Works. For the most part this was carried out by the Metallurgical Laboratory at the University of Chicago although most of the manufacturing was performed by subcontractors such as Hallicrafters and National Technical Laboratories (which later became Beckman Instruments). The third major crisis was the preparation for the Trinity Test, the first nuclear explosion.
Many of those who helped develop the instrumentation for the Manhattan Project started their own companies after the war was over. The better known of these companies were Tracerlab, Atomic Instrument Company, Nuclear Instrument and Chemical Corporation (which later became Nuclear Chicago), Radiation Counter Laboratories, Nuclear Measurements Corporation, and Berkeley Scientific Company.
The first major stimulus for the production of instrumentation after WW II was Operation Crossroads, i.e., the atomic tests in the Pacific in 1946 and 1947. The previously mentioned start-ups failed to benefit however. Almost all the instrumentation for Operation Crossroads was supplied by the Victoreen Instrument Company, e.g., the Proteximeter, the Model X-263 GM, the Model X-325 GM, the Model 247 ion chamber, and the Model 263 GM.
In the 1950s, the demand for uranium to supply the nation’s weapons program and the nuclear power industry, and the sudden availability of a wide range of nuclides, primarily from the Oak Ridge Graphite reactor, spurred the growth of a new crop of instrument companies.
References
- Morgan, G.W., Surveying and Monitoring of Radiation from Radioisotopes Nucleonics, March 1949, p. 24.
- Kathren, R. Historical Development of Radiation Measurement and Protection, CRC Handbook of Radiation Measurement and Protection, p. 13.
- Lapp, R.E. Survey of Nucleonics Instrumentation Industry, Nucleonics May 1949 p. 100.
Four Key Developments in the History of Survey Instruments
- Invention of the count rate meter (ca. 1937)
- Development of miniature electrometer tubes (ca. 1938)
- Development of photomultiplier tubes and scintillation crystals (ca. 1945 - 1950)
- Invention of the transistor (1947) and its subsequent commercial availability
A Description of the Health Physics Instruments at the Clinton Labs during WW II
The following data is from “Protective Measures for Personnel” by J.J. Nickson which appeared in “Industrial Medicine on the Plutonium Project” ed. Robert Stone, Vol. IV-20 in the National Nuclear Energy Series, 1951
Poppy
- Air proportional counter, tungsten wire anode, 2500 volt potential
- Readout: Arbitrary units on meter
- Audio output: Yes
- Range: 0-100, 0-1,000, 0-10,000 cpm
- Radiation detected: Alpha
- Weight: 60.5 pounds
- Chamber size: 1.5” x 10,” various probes used
- Warm-up time: 50 s
- Some microphonic noise
- Ruggedness: Good
- AC-powered
- Controls: Six
- Response affected by moisture
Developed by C.J. Borkowski and C.R. Marsh “Poppy-Pulse Type Detector for Alphas, Betas, Gammas, and Neutrons” AECD-2410, 1945.
Walkie-Talkie
- GM detector
- Readout: No meter
- Audio: Yes
- Range: “Blocks out above 30 mR/h”
- Radiation detected: beta, gamma
- Size: 9.5” x 7.25” x 4”
- Weight: 10.5 pounds
- Chamber size: 0.75” x 6” GM
- Warm-up time: 10 s
- Not calibrated, used for scanning
- Ruggedness: Good
- Controls: Two
- Shoulder strap
Zeuto (Zuto)
- Ion chamber
- Readout: Linear scale
- Audio: None
- Range: 6,000 to 60,000 dpm
- Radiation detected: Alpha but some sensitivity to betas and gammas
- Size: 10.5” x 5.5” x 5.5”
- Weight: 9.5 pounds
- Chamber size: 1.75” x 3.5” x 5”
- Warm-up time: 90 s
- Some microphonics
- Ruggedness: Fair
- Controls: Two
Developed by Frank Shonka at the University of Chicago. A modification of the Zeus.
Zeus
- Ion chamber
- Readout: Linear scale
- Audio: None
- Range: 0-50, 0-250 0-5,000 mR/h
- Radiation detected: Alpha, beta, gamma
- Size: 12.5’ x 6.5” x 6”
- Weight: 12 pound
- Chamber size: 4.5” x 6” x 4”
- Warm-up time: 30 s
- Ruggedness: Good
- Controls: Two
Developed at Chicago by Frank Shonka.
Pluto
- Readout: Linear scale
- Audio: None
- Range: 0-60,000 dpm
- Radiation detected: Alpha
- Size: 10.75” x 5.75” x 5.5”
- Weight: 7.75 pounds
- Chamber size: 3.5’ x 5” x 1.5’
- Warm up time: 30 min
- Susceptible to microphonics
- Control: One
After a few months the name was changed because of its similarity to plutonium. The official new name was “Snoops” although it was also known as “ Sandy.”
Lauritsen electroscope
- Readout: Linear scale, read by microscope, need stopwatch
- Audio: None
- Range: 0-1,000 mR/h
- Radiation detected: Beta gamma
- Size: 13.75” x 3.5” x 8.75”
- Weight: 7.75 pounds
- Chamber size: 2.25” x 3”
- Warm-up time: 0
- Ruggedness: Good
- Controls: Three
Cutie-Pie
- Ion chamber with pistol grip
- Readout: Linear scale
- Audio: None
- Range: 0-30, 0-300, 0-2,000 mR/h
- Radiation detected: beta gamma
- Size: 6.5” x 5.5” x 3.75”
- Weight: 4 pounds
- Chamber size: 3.25” x 6”
- Warm-up time: 30 s
- Ruggedness: Good
- Controls: Two
Developed by C.O. Ballou of what is now Oak Ridge National Laboratory.
Reference: Bellou, C.E. “Cutie Pie, a Portable Radiation Instrument” MDDC-997, September 22, 1945.
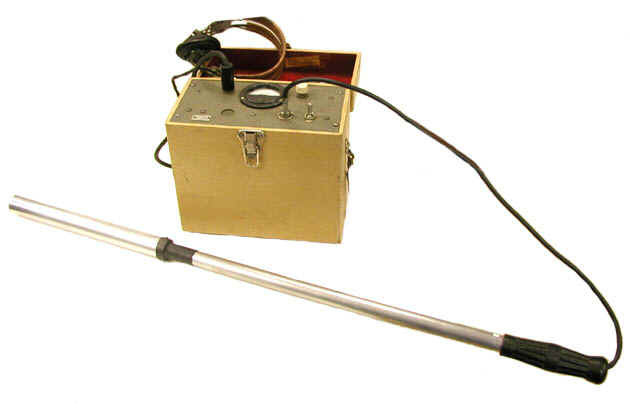
Fish Pole
- Ion chamber on end of pole, electrometer tube inside chamber
- Readout: Linear scale
- Audio: No
- Range: 0-40,000 mR/h
- Radiation detected: Beta gamma
- Size: 6” x 5.75” x 4.5”
- Weight: 5.5 pounds
- Chamber size: 3” x 2.25”
- Warm up time: 4 s
- Ruggedness: Fair
- Controls: Two
- Shoulder strap
- Similar to Cutie Pie but smaller input resisters for lower sensitivity and only one or two scale
L & W Electroscope (Landsverk and Wollan)
- Improved version of Lauritsen electroscope
- Readout: Linear scale viewed with microscope
- Audio: none
- Range: 0-200, 0-2,000 mR/h
- Radiation detected: Beta gamma
- Size: 6.5” 3.75” x 8”
- Weight: 5 pounds
- Chamber size: 3 x 1.5”
- Warm up time: 0
- Susceptible to microphonics
- Ruggedness: poor
- Controls: Three
Paint Pail
- Ion chamber in paint can
- Readout: Linear
- Audio: None
- Range: 0-20, 0-200, 0-2,000 mR/h
- Radiation detected: Gamma
- Size: 9” x 20” with pistol grip
- Weight: 11 pounds
- Chamber size: 9” x 9”
- Warm-up time: 20 s
- Ruggedness: Good
- Controls: Five
The first detector to use the two-tube balanced circuit. The latter was developed by W.P. Overbeck in 1943 at what is now Oak Ridge National Laboratory.
Feinberg Radiation Meter
- Range: 0-25, 0-100, 0-1000 mR/h
- Audio: None
- Radiation detected: Beta, gamma
- Size: 10” x 6.5” x 11.5”
- Weight: 11.5 pounds
- Chamber size: 6” x 6”
- Warm up time: 8 minutes
- Ruggedness: Fair
- Controls: Two
Betty Snoop
- Probe with small plastic ion chamber, removable cap on end
- Range: 0-0.2, 0-2, 0-20 and 0-200 rep/h
- Chamber size: 3 cm diameter
- Radiation detected: Beta, gamma
- Suitable for high end measurements in narrow beams.
The Nick Names of the Early Survey Meters
During WW II, a variety of code names were given to the Manhattan Project’s radiation detection instruments, presumably as a security measure. In an unpublished manuscript, K.Z. Morgan (ca. 1951) stated “Perhaps at this point one should apologize for the names that are used for these meters. They were chosen to be as silly as possible, supposedly to confuse “unauthorized personnel” during the war.” Herb Parker, another member of the original group of health physicists at the Metallurgical Laboratory, held the same opinion. He explained "somehow we fell into the habit of getting light relief" with these "foolishly named" instruments (BRH Vignettes of Early Radiation Workers). Another Metallurgical Laboratory worker, Norman Hilberry, commented that the meters were given "cockeyed crazy names." Nevertheless, the instrumentation had to be called something, and similar nick-names continued to be given to such equipment long after the need for secrecy had passed.
The following list identifies some of the better known code names given to early instrumentation:
- “Betty Snoop,” an ion chamber named after the cartoon character Betty Boop (1943-1945).
- “Chang and Eng,” a dual chamber neutron detector named by Herb Parker after the famous Siamese twins (1943-1945).
- “Cutie Pie,” an ion chamber given the slang term for something really neat (1943-1944)—it was "named Cutie Pie due to its diminutive size."
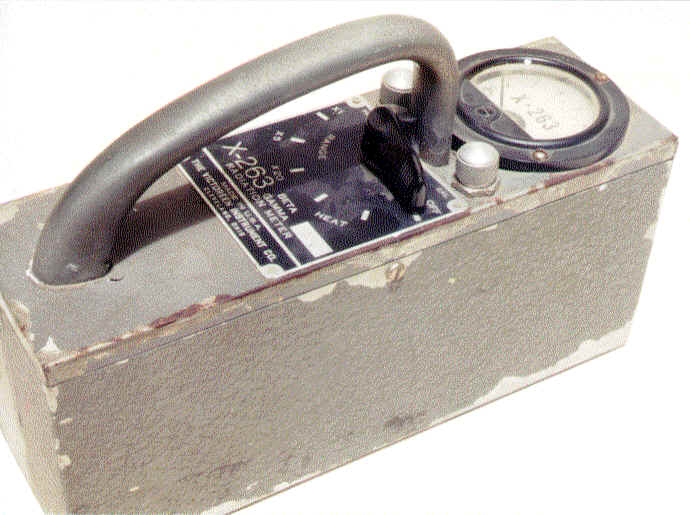
- “Doc,” a Victoreen GM detector named after one of the dwarves in the Disney Movie “Snow White.” (ca. 1940).
- “Fish Pole,” a high end ion chamber at the end of a long pole. The meter might be attached to the pole or separate from it. The meter however is not a “cutie Pie style instrument with a pistol grip.
- “Juno,” an ion chamber named after the queen of the gods in Roman mythology, i.e., the wife of Jupiter, (late 1940s). Developed at Hanford under the direction of Carl Gamertsfelder.
- “Long Tom,” a modification of the Cutie Pie with the ion chamber connected to the meter at the end of a 40” extension.
- “Paint Pail,” an ion chamber housed inside an actual paint pail (1943-1945).
- “Pee Wee,” an air proportional counter for alpha contamination (ca. 1950).
- “Pluto,” an alpha detector named after Mickey Mouse’s dog (1943-1945).
- “Poppy,” a proportional counter named for its characteristic audio output.
- "Radium hen" also known as the "clucking hen" a GM detector with audio output developed by Thomas Chalmers at the National Physical Laboratory in England during the 1930s. The name derived from the audio output which sounded like clucking. Quoting an August 24, 1935 article in the Reno Evening Gazette: "The hen family can well be proud of the "bird." It is sexless and yet clucks excitedly like any barnyard Leghorn. It needs no food, except electricity, looks like an ordinary watering can, and has led perplexed scientists to the location of many radium eggs." The Radium Hen would get my vote as the first true survey meter.
- “Rascal,” an Eberline instrument that combined the functions of a ratemeter and a scaler (ca. 1980).
- “Rudolph,” neutron detector with red nose on the end of the probe (early 1950s).
- “Samson,” an ion chamber named after the Biblical hero. Possibly an acronym for “son of standard alpha monitor” (early 1950s).
- “Sandy,” another name for the “Pluto,” named after Little Orphan Annie’s dog (1943-1945).
- “Sneezy,” an air sampler named after one of the dwarves in “Snow White” (1943-1945).
- “Snoops,” another name for the “Pluto.” (1943-1945).
- “Snoopy,” a neutron detector named after Charlie Brown’s dog (1960s vintage).
- “Sweepy,” a floor monitor.
- "Tattler," a personal monitor (chirper) made by Victoreen (ca. 1950s/60s).
- “Walkie Squawkie” a light weight GM survey meter with speaker for audio output (ca. 1945).
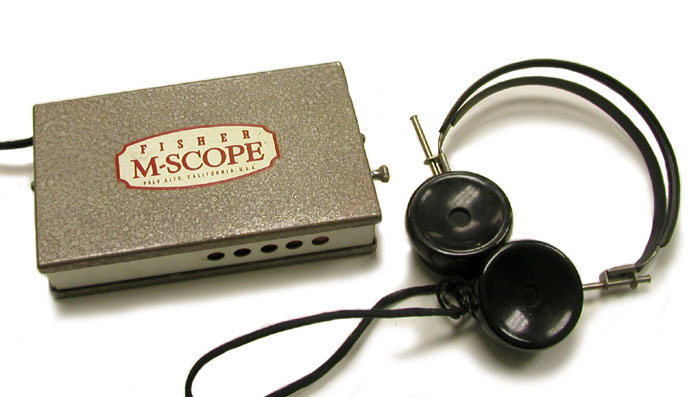
- “Walkie Talkie” a light weight GM survey meter using headphones (ca. 1945).
- “Zeus,” an ion chamber named after the chief god in Greek mythology (1943-1945). Developed by Frank Shonka at the University of Chicago during WWII.
- “Zeuto,” also spelled “Zuto,” a combination of “Zeus” and “Pluto” (1943-1945).
During WW II, the use of “Pluto,” Mickey Mouse’s dog, as the name for an alpha detector caused something of a stir—it was too reminiscent of “plutonium.” As a result, the powers that be (or were) changed the name to “Snoops” but the latter never really caught. Another name, “Sandy” (little orphan Annie’s dog), had a little more success as a substitute for “Pluto.” Down but not out, “Snoops” managed several comebacks: in the name for a high-end ion chamber, the “Betty Snoop” (named after the cartoon character, Betty Boop); in the “Snooper,” an inexpensive GM survey meter produced by Precision Radiation Instruments in the 1950s, and; in “Snoopy” a well known neutron rem meter developed in the 1960s.
Sadly, the use of nicknames for survey meters has declined in recent years, but one of my favorites, the “Rascal,” is of fairly recent vintage (ca. 1980). The name is a descriptive one. It, just like the instrument, is a combination of “ratemeter” and “scaler”
Instruments Available in Early 1940s
-
First Commercially Available Survey Meter First Commercially Available Survey Meter

-
Victoreen Model 263, the "Doc" Victoreen Model 263, the "Doc"

Instruments Developed During WW II
-
"Zeuto" Alpha Meter from the Metallurgical Laboratory "Zeuto" Alpha Meter from the Metallurgical Laboratory

-
Chang and Eng Neutron Detector Chang and Eng Neutron Detector

-
Gamma Only Version of Zeus Survey Meter Gamma Only Version of Zeus Survey Meter

-
Victoreen Model 300 "Proteximeter" Victoreen Model 300 "Proteximeter"

-
Zeus Survey Meter Zeus Survey Meter

Instruments Developed from the Mid to Late 1940s
-
"Betty Boop" "Betty Boop"

-
"Pee Wee" Model 2111 Alpha Counter "Pee Wee" Model 2111 Alpha Counter

-
Babbel Counter Babbel Counter

-
Beckman Model MX-2 Beckman Model MX-2

-
Beckman Model MX-5 Beckman Model MX-5

-
Beckman Model MX-6 Beckman Model MX-6

-
Cutie Pie from Hanford Cutie Pie from Hanford

-
El-Tronics SGM-18A GM Survey Meter El-Tronics SGM-18A GM Survey Meter

-
Fisher "M-Scope" Fisher "M-Scope"
-
Fisher M-Scope C-12 Geiger Counter Fisher M-Scope C-12 Geiger Counter

-
Fisher M-Scope C-18 Geiger Counter Fisher M-Scope C-18 Geiger Counter
-
GM from Harvard University GM from Harvard University
-
Juno Ion Chambers Juno Ion Chambers

-
Keleket Model K-800 Survey Meter Keleket Model K-800 Survey Meter

-
Nucleonic Company of America Model RM1 Nucleonic Company of America Model RM1

-
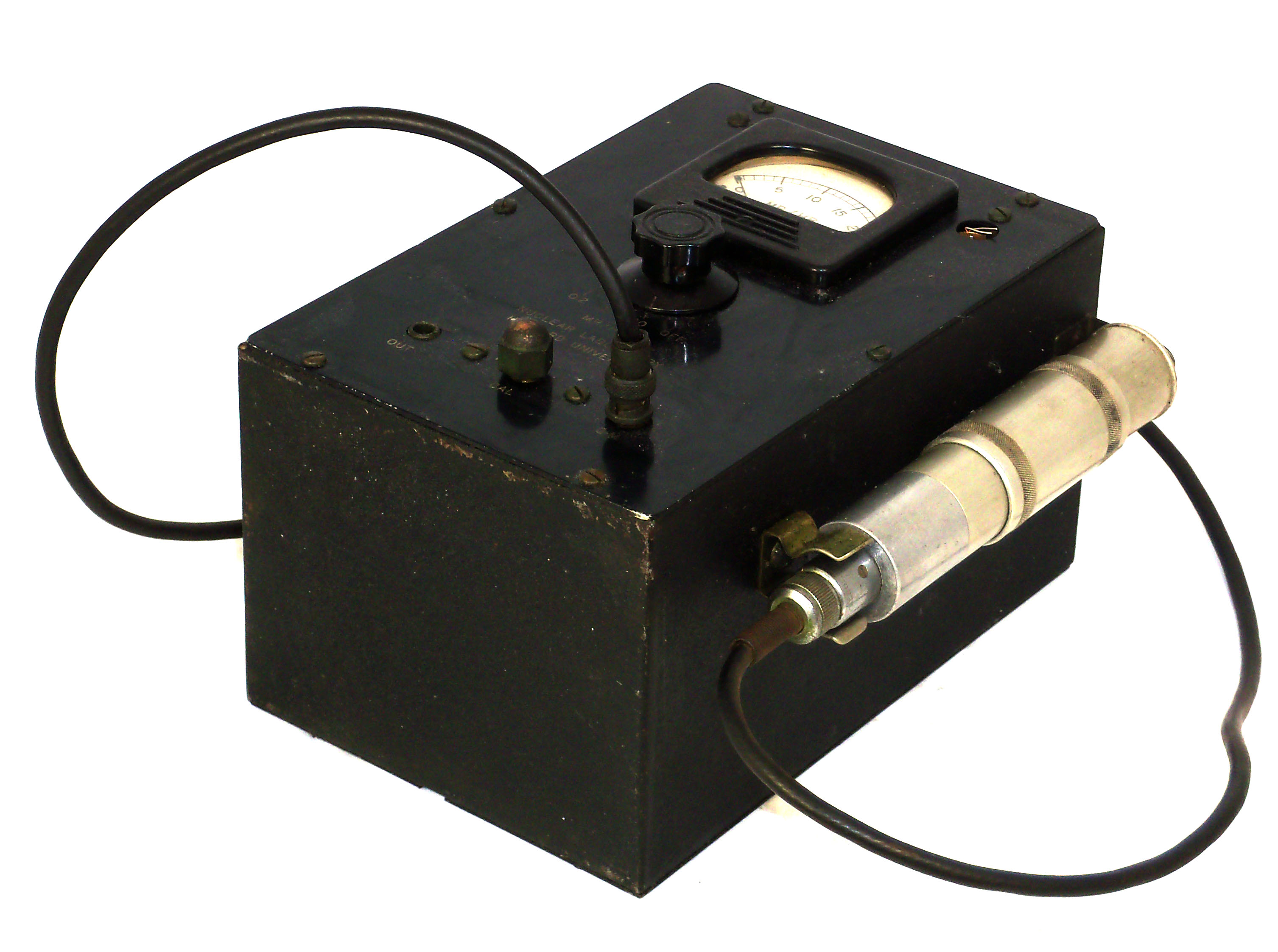
Stafford Warren's X-263 GM Detector Stafford Warren's X-263 GM Detector
-
Tracerlab Model SU-1 "Cutie Pie" Tracerlab Model SU-1 "Cutie Pie"

-
Tracerlab Model SU-10 Tracerlab Model SU-10

-
Victoreen Model 356 "Zeuto" Victoreen Model 356 "Zeuto"

-
Victoreen Models 247 A and 247B Ion Chambers Victoreen Models 247 A and 247B Ion Chambers

-
Walkie Talkie from ORNL Walkie Talkie from ORNL
Instruments from the 1950s
-
"Super Sniffer" Geiger Counter "Super Sniffer" Geiger Counter

-
Atomic Research Corporation Model 231 Geiger Mueller Survey Meter Atomic Research Corporation Model 231 Geiger Mueller Survey Meter

-
Berkeley Model 2080 Scaler Counter Berkeley Model 2080 Scaler Counter

-
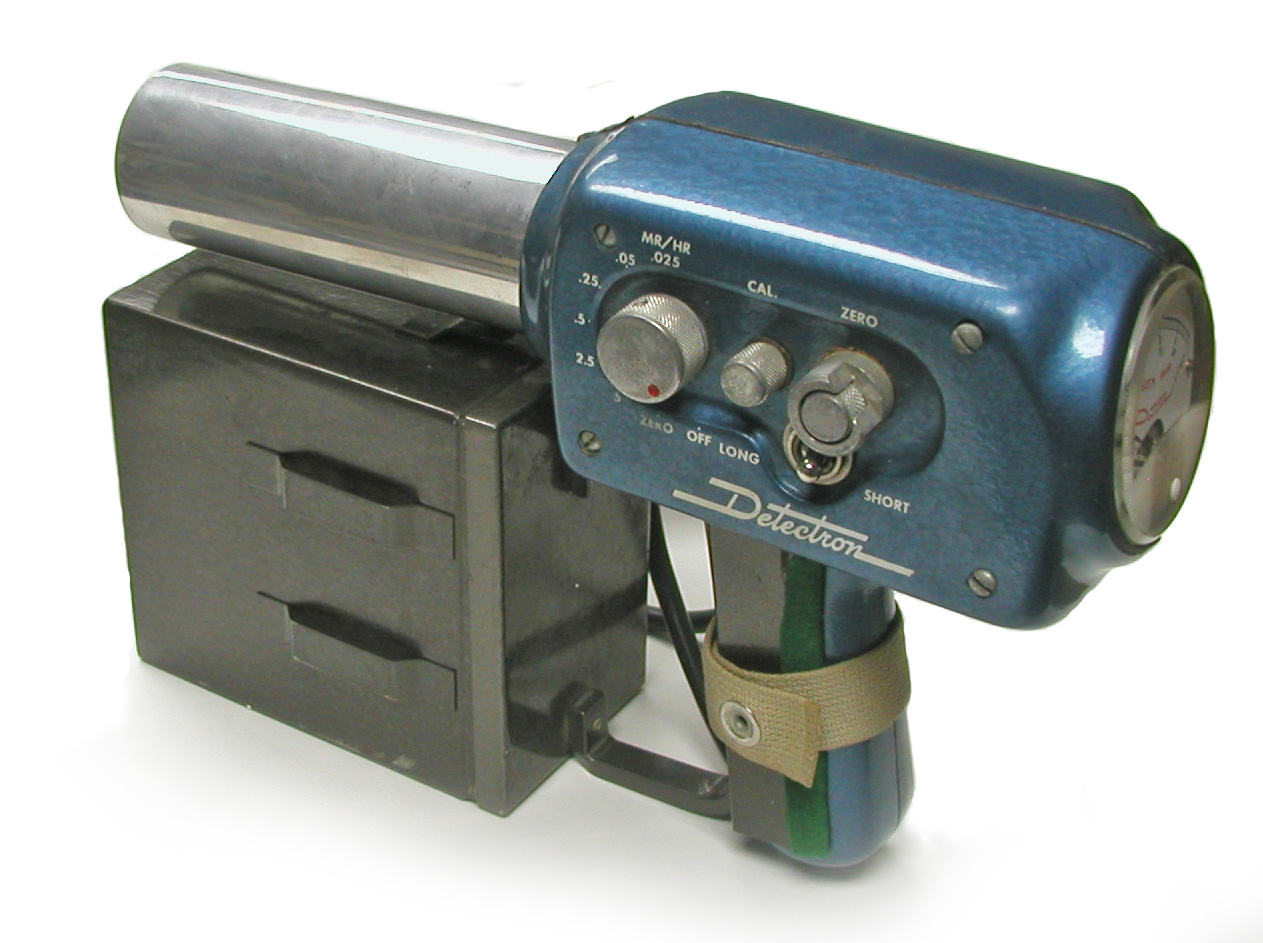
Detectron Corporation Model DG-2 Geiger Mueller Survey Meters Detectron Corporation Model DG-2 Geiger Mueller Survey Meters

-
Detectron Corporation Model DG-7 Geiger Mueller Survey Meter Detectron Corporation Model DG-7 Geiger Mueller Survey Meter

-
Detectron Model DG-5 "Claimstaker" Detectron Model DG-5 "Claimstaker"

-
Detectron Model DS-234 Detectron Model DS-234
-
Detectron Nucliometer Model DR-299 Geiger Mueller Survey Meter Detectron Nucliometer Model DR-299 Geiger Mueller Survey Meter

-
ECL "Electro-Count" GM Detector ECL "Electro-Count" GM Detector

-
ECL Model EC 6 "Bismo-Count" GM Detector ECL Model EC 6 "Bismo-Count" GM Detector

-
ECL Model EC 9 "Crysto-Count" Scintillation Counter ECL Model EC 9 "Crysto-Count" Scintillation Counter

-
EICO Model 803 Geiger Counter EICO Model 803 Geiger Counter

-
El-Tronics PR-31 Scintillation Counter El-Tronics PR-31 Scintillation Counter

-
El-Tronics PR-32 Scintillation Counter El-Tronics PR-32 Scintillation Counter

-
El-Tronics PR-3A GM Survey Meter El-Tronics PR-3A GM Survey Meter

-
El-Tronics PR-4 "El Dorado" GM Survey Meter El-Tronics PR-4 "El Dorado" GM Survey Meter

-
El-Tronics PR-5A GM Survey Meter El-Tronics PR-5A GM Survey Meter

-
El-Tronics PR-7 GM Survey Meter El-Tronics PR-7 GM Survey Meter

-
Fisher "Uranium Scout" Fisher "Uranium Scout"

-
Goldak "Colorado" GM Detector Goldak "Colorado" GM Detector

-
Goldak U-238 GM Detector Goldak U-238 GM Detector

-
Halross Model 939 Scintillometer Halross Model 939 Scintillometer

-
Hoffman "Countmaster" Scaler/Ratemeter Hoffman "Countmaster" Scaler/Ratemeter

-
Jordan AG-15 Jordan AG-15

-
Jordan Model AG-500 “Radector” Jordan Model AG-500 “Radector”

-
Jordan Model AGB-10KG-SR "Radgun" Jordan Model AGB-10KG-SR "Radgun"

-
Jordan Model AGB-10K-SR (?) Jordan Model AGB-10K-SR (?)
-
Jordan Model AGB-50-SR “Radector” Jordan Model AGB-50-SR “Radector”

-
Kelly-Koett Model K-350B Ion Chamber Kelly-Koett Model K-350B Ion Chamber

-
La Roe Scintillation Detector La Roe Scintillation Detector

-
Model 109 "Professional" Model 109 "Professional"

-
Model 115 "Super Scintillator" Model 115 "Super Scintillator"

-
Model 606 AEA GM Survey Meter Model 606 AEA GM Survey Meter

-
Model L3TSM-56 "Oremaster" Super Geiger Counter Model L3TSM-56 "Oremaster" Super Geiger Counter

-
Nuclear-Chicago Model 2586 "Cutie Pie" Nuclear-Chicago Model 2586 "Cutie Pie"

-
Nuclear-Chicago Model 2612 GM Nuclear-Chicago Model 2612 GM

-
Nuclear Instrument and Chemical Corp Model 2584 Nuclear Instrument and Chemical Corp Model 2584

-
Nuclear Instrument and Chemical Corp Model 2610 and Model 2610A GMs Nuclear Instrument and Chemical Corp Model 2610 and Model 2610A GMs

-
Nuclear Measurements Model GS-2 GM Nuclear Measurements Model GS-2 GM

-
Nuclear Measurements Model GS-3 GM Nuclear Measurements Model GS-3 GM

-
Nucleonic Company of America "Orelokator" GM Survey Meter Nucleonic Company of America "Orelokator" GM Survey Meter

-
Nucleonic Company of America RM2 Nucleonic Company of America RM2

-
NUCOR Model D-6 "Samson" Alpha Meter NUCOR Model D-6 "Samson" Alpha Meter

-
Perfecto "Claim Striker" Geiger Counter Perfecto "Claim Striker" Geiger Counter

-
Precision Model 106 and 106B "Lucky Strike" Precision Model 106 and 106B "Lucky Strike"

-
Precision Model 107C "Professional" Precision Model 107C "Professional"

-
Precision Model 108 "Snooper" Precision Model 108 "Snooper"
-
Precision Radiation Instruments' Model 117B "Special Scintillator" Precision Radiation Instruments' Model 117B "Special Scintillator"

-
Precision Radiation Instruments Model 118 "Royal Scintillator" Precision Radiation Instruments Model 118 "Royal Scintillator"

-
Precision Radiation Instruments Model 121 "Drill Hole" Precision Radiation Instruments Model 121 "Drill Hole"

-
Precision Radiation Instruments Model 123 "Squealer" Precision Radiation Instruments Model 123 "Squealer"

-
Precision Radiation Model 111 and 111B Scintillator Precision Radiation Model 111 and 111B Scintillator

-
Ra-Loc 101 GM Ra-Loc 101 GM

-
RCA Model WF-10A GM Survey Meter RCA Model WF-10A GM Survey Meter

-
RCA Model WF-12A GM Survey Meter RCA Model WF-12A GM Survey Meter

-
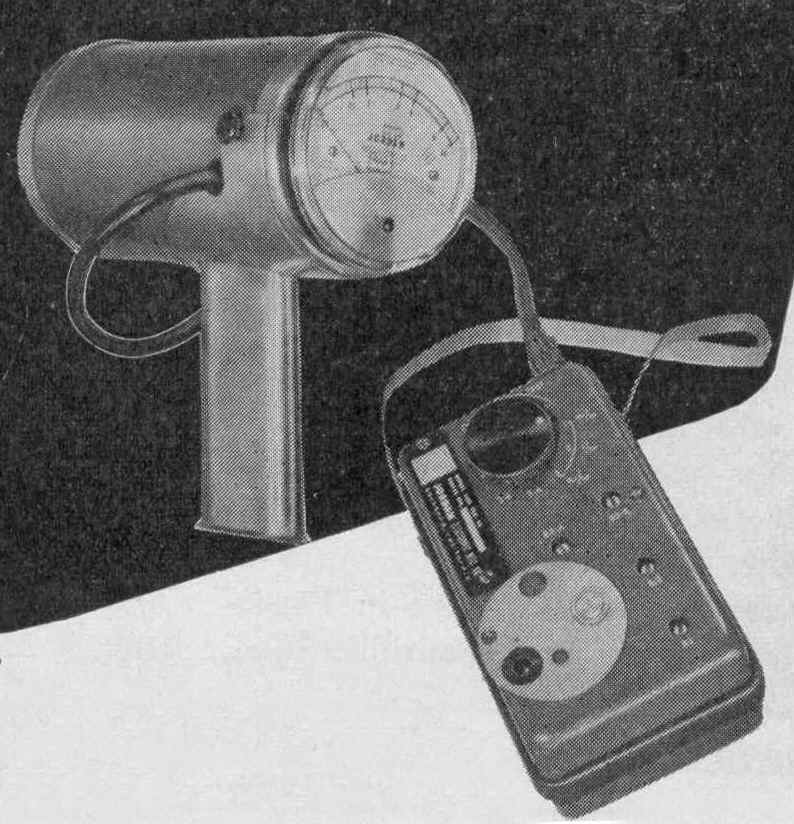
Scientific Radio Products Model S 101 Geiger Gun Scientific Radio Products Model S 101 Geiger Gun

-
Sears Tower Model 6154 Pocket GM Meter Sears Tower Model 6154 Pocket GM Meter

-
Sears Tower Model 6156 GM Meter Sears Tower Model 6156 GM Meter

-
Sears Tower Model 6157 GM Meter Sears Tower Model 6157 GM Meter

-
Sears Tower Model 6158 GM Meter Sears Tower Model 6158 GM Meter

-
Sears Tower Model 6160 Gamma Scintillator Sears Tower Model 6160 Gamma Scintillator

-
Shelby Instrument Company "Gammascope" Geiger Counter Shelby Instrument Company "Gammascope" Geiger Counter

-
Sylvania Model U-235 Radio-GM Combo Sylvania Model U-235 Radio-GM Combo

-
Tracerlab Model SU-14 GM Survey Meter Tracerlab Model SU-14 GM Survey Meter

-
Victoreen Model 389 "Thyac" Victoreen Model 389 "Thyac"

-
Victoreen Model 631 "Vic-Tic" Victoreen Model 631 "Vic-Tic"

-
Victoreen Model 641 "Combination Counter" Victoreen Model 641 "Combination Counter"

-
Victoreen Model 645 "Scintillac" Counter Victoreen Model 645 "Scintillac" Counter

Instruments from the 1960s
-
American Nuclear Corporation Model ANC-100XL "Ray-D-Tec" American Nuclear Corporation Model ANC-100XL "Ray-D-Tec"

-
Integrating Pulse Discharge Ionization Chamber Detector Integrating Pulse Discharge Ionization Chamber Detector

-
NUCOR CS-40A Ion Chamber NUCOR CS-40A Ion Chamber

-
NUCOR E-1D Fast Neutron Detector NUCOR E-1D Fast Neutron Detector

-
Portable Integrating Radiation Monitor Portable Integrating Radiation Monitor

-
Tracerlab Model PS-1 Portable Spectrometer Tracerlab Model PS-1 Portable Spectrometer

-
Victoreen Model 592B "Gamma Dose Rate Meter" Victoreen Model 592B "Gamma Dose Rate Meter"

Radiation Survey Instruments
The first generation of radiation survey instruments were developed during World War II. A number of 1940s and 1950s era instruments are on display in the collection.